SOLIDWORKS Composer——機器人動畫制作技巧
日期:2022-05-24 14:31:14 發布者: ICT-Lee 瀏覽次數:次
SOLIDWORKS Composer是一款非常強大的技術交流工具,它的用途廣泛,從①技術文檔的制作(產品說明、技術插圖、用戶手冊) ②生產&制造(培訓教程、裝配指導書、用戶手冊)③客戶服務&培訓(安裝指導)④銷售&市場(產品介紹及演示)均可以幫助到我們工程師更好的設計,給我們企業帶來更大的價值。
以裝配體流水線為例,我們可以通過SOLIDWORKS Composer把各個工位動作表現出來,這裡我們針對機器人的動作設計進行討論:
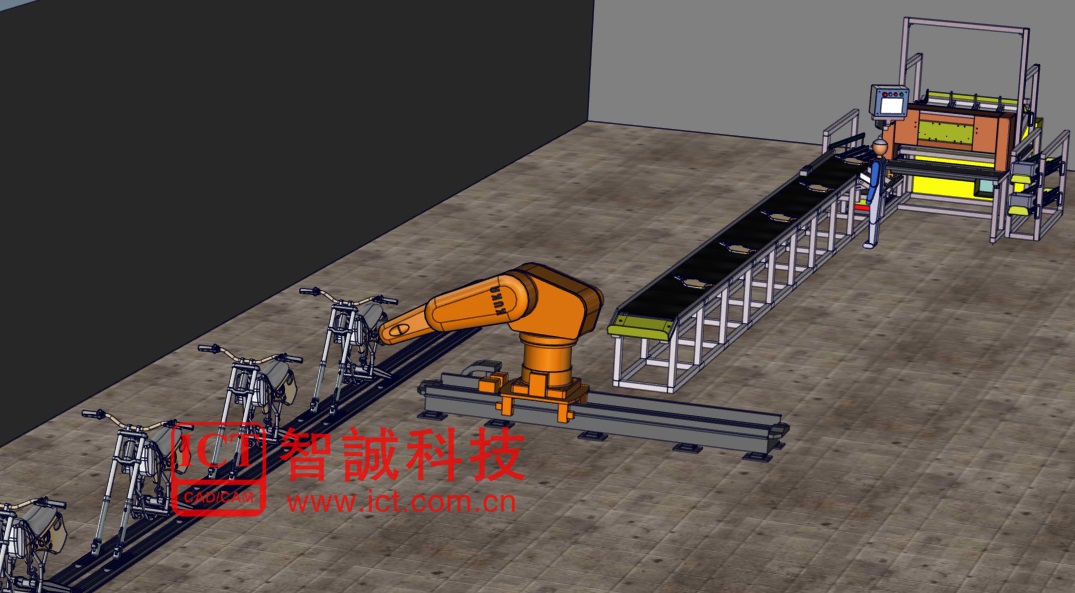
機器人在用戶做方案中會很常見,那麼針對機器人動畫的制作,我們如何在SOLIDWORKS Composer中,保證其聯動,達到預期的動作,我們接下來將詳細講解:
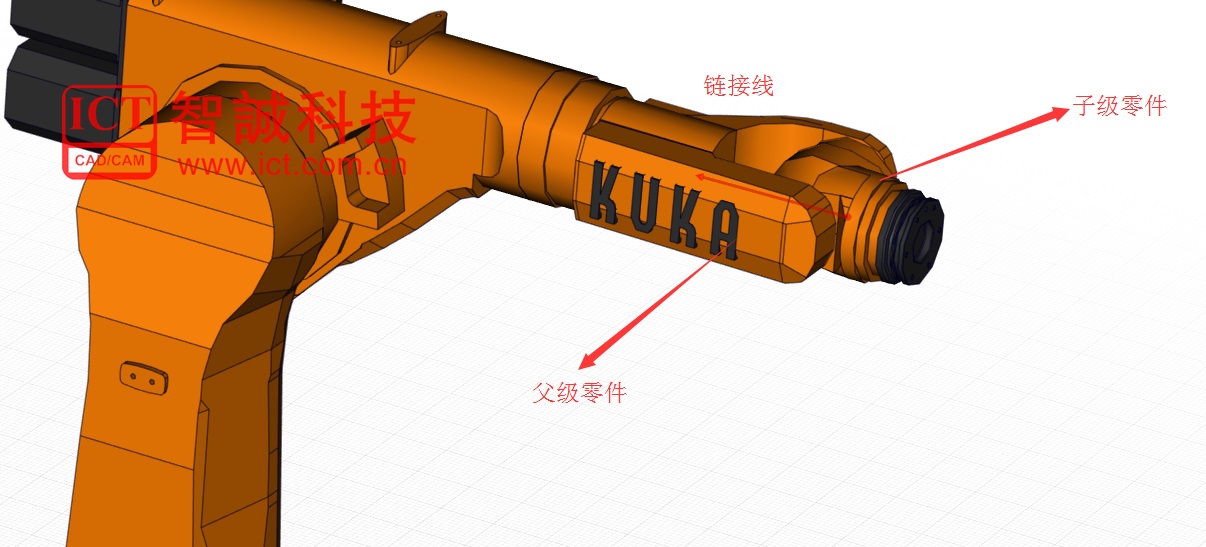
一、 要做到六軸機械手各個關節檢彼此關聯,我們首先要鏈接父子級
在工具欄中,選擇變換___鏈接__鏈接子級對像到父級對像

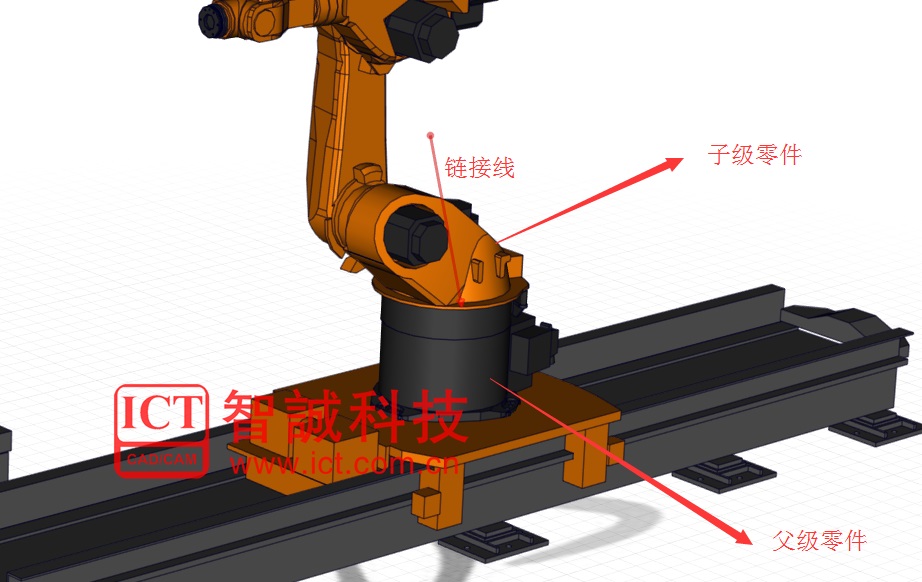
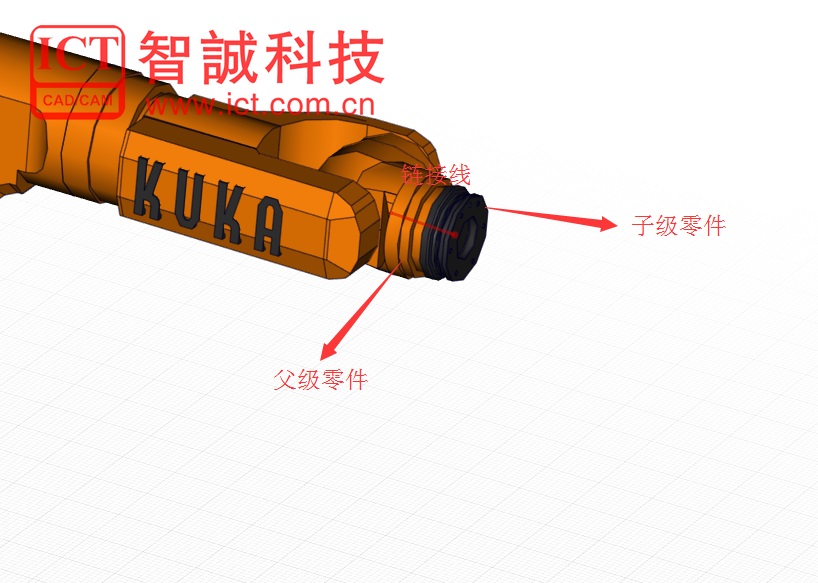
然後我們在視圖區域將子集鏈接到父級上(注,先選擇子級,再選擇父級,然後會出現一個箭頭從子級指向父級):
Step1:從最底層開始鏈接父子級:

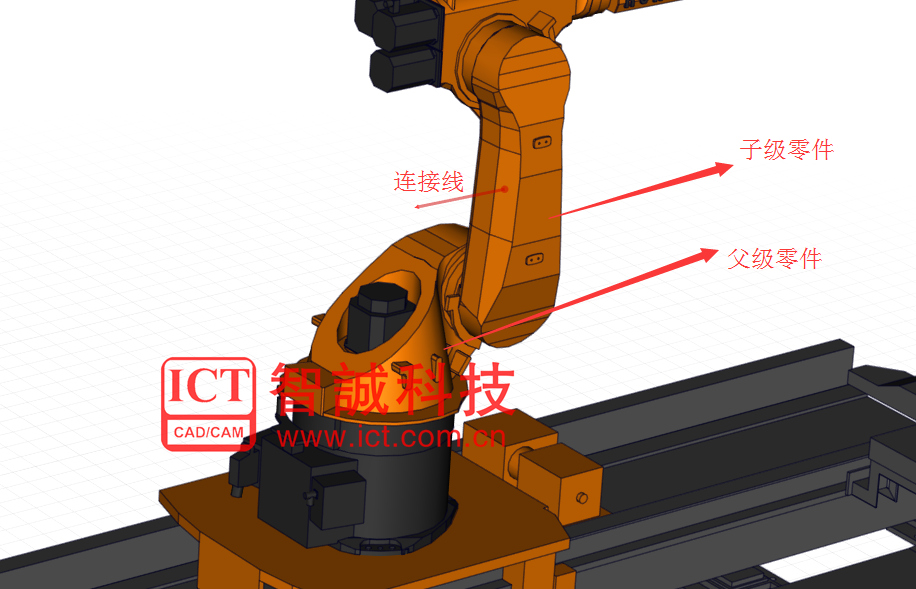
Step2:第二層鏈接:
Step3:第三層鏈接:
Step4:第四層鏈接:
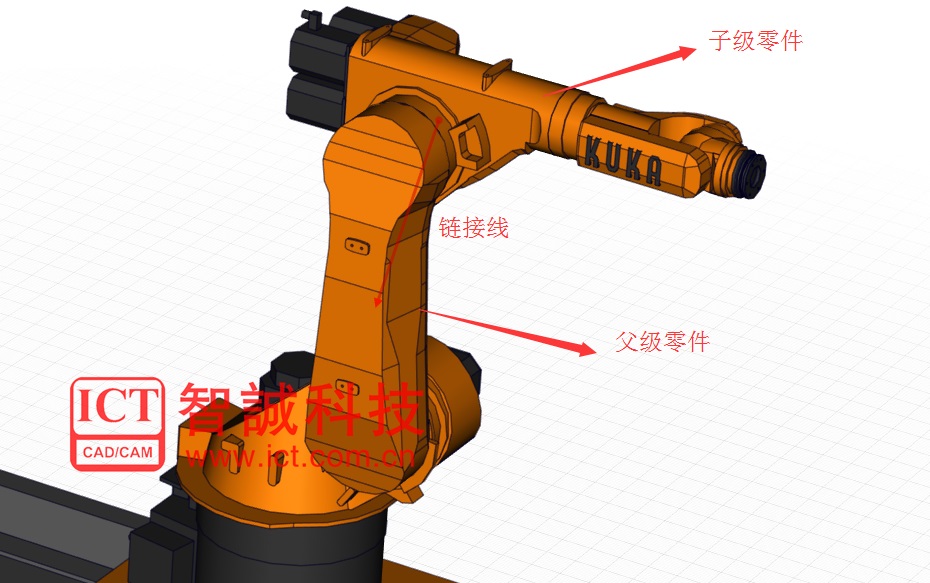
Step5、第五層鏈接:
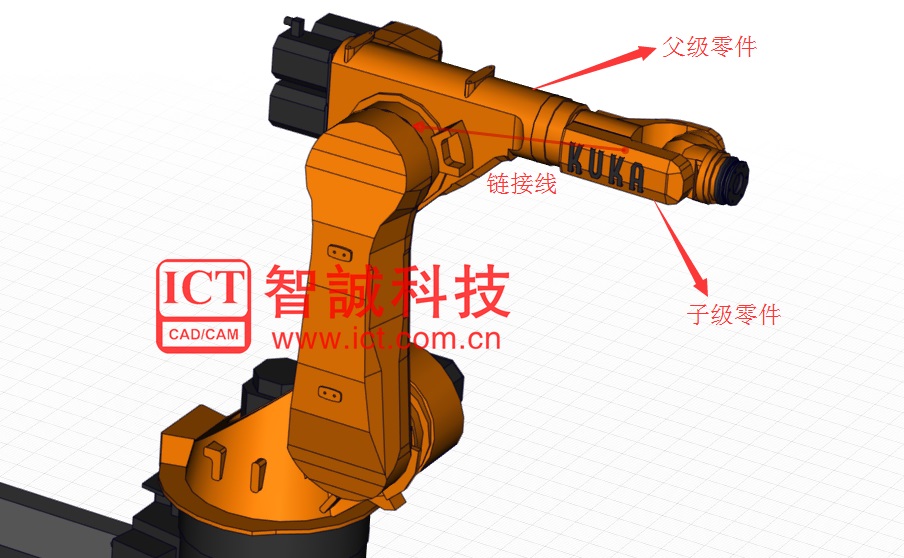
Step6、第六層鏈接:
Step7、第七層鏈接:
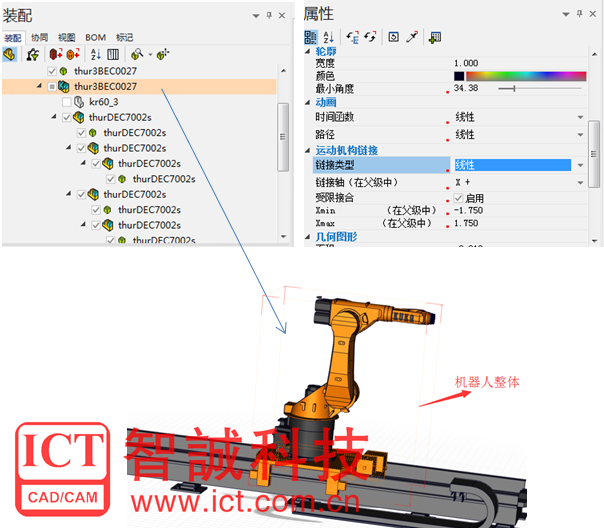
父子級鏈接完成後,我們可以在對應的設計樹種看到其包含關系,點擊每一個層級,在屬性窗格中設置其運動機構鏈接:
Step1、選擇設計樹層級1,屬性中的運動機構鏈接選 “線性”,這樣設置後整體機器人就會在滑軌上有線性的運動。
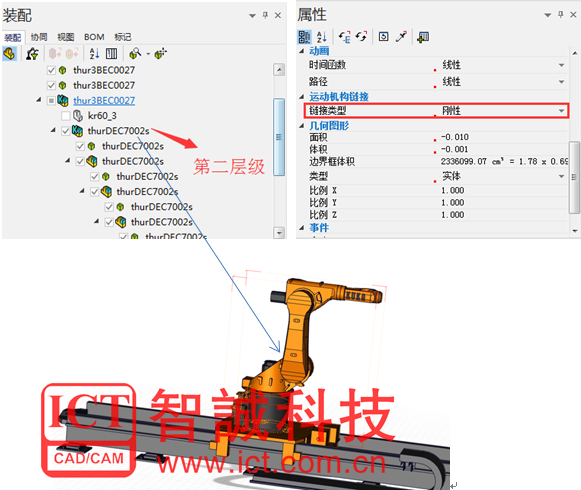
Step2、選擇設計樹層級2,屬性中的運動機構鏈接選“剛性”這樣,機器人底座和滑塊就成為共同的剛性組件。
Step3、選擇剩余的層級,由於剩余層級中的鏈接均為樞軸,屬性中的運動機構鏈接均選“樞軸”
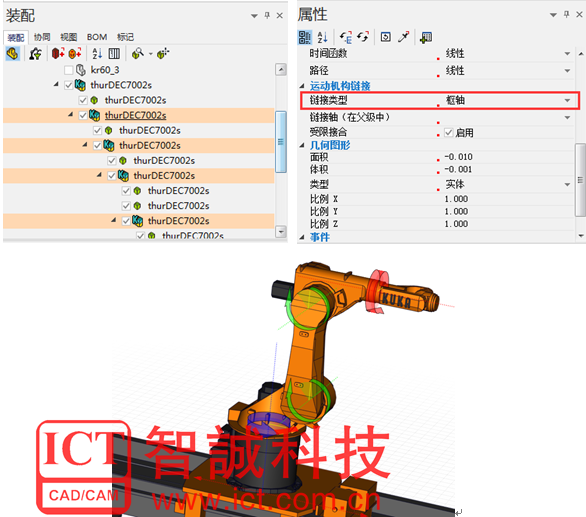
注:點擊DOF會顯示上圖的樞軸箭頭,方便我們查看

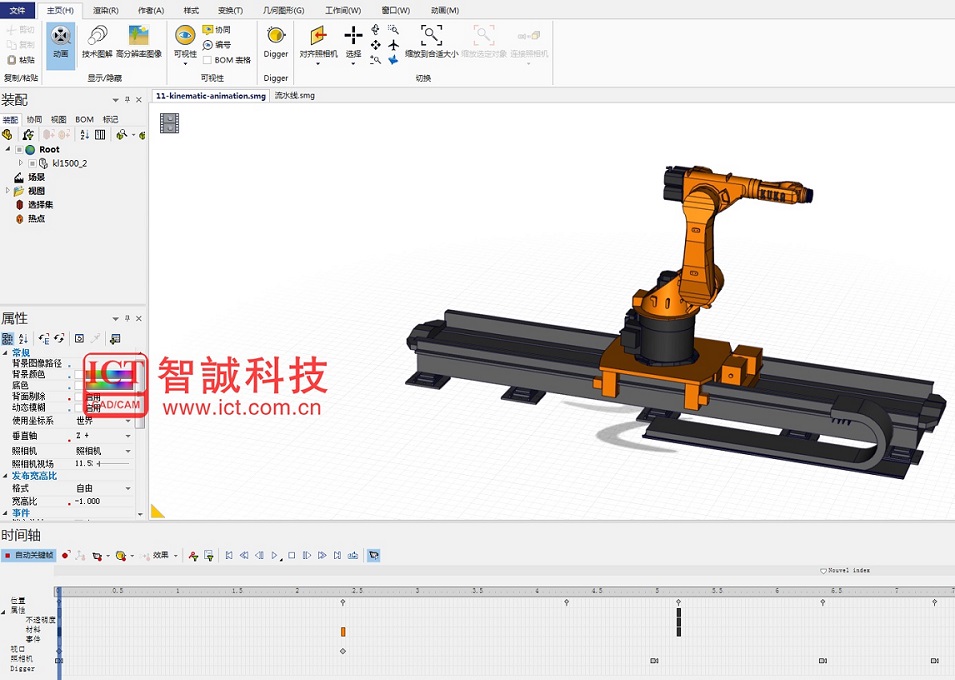
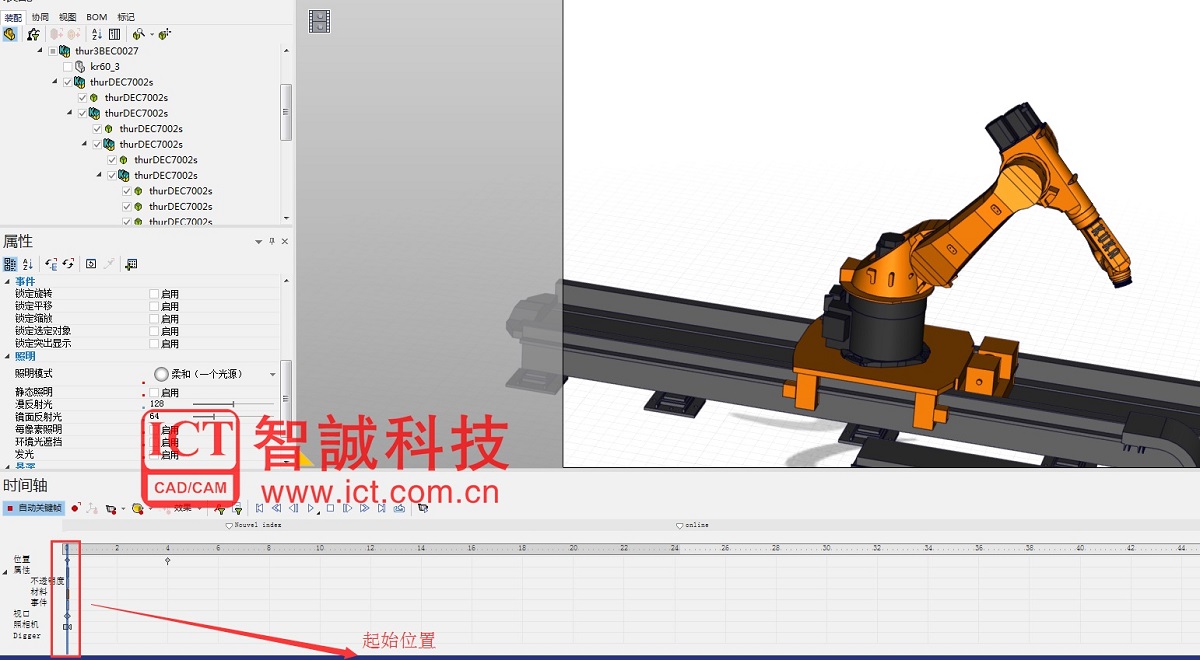
點開上圖模式,通過自由拖動我們就可以設置機器人的位置了,並且產生相應的機器人動畫:
Ex:起始位置:
終止位置:

過度動畫gif展示:

以上 SOLIDWORKS技巧 由智誠科技ICT公司技術同事提供,更多SOLIDWORKS技巧可關注官方微信: